特斯拉日前获得一项“使用视觉图像数据估计物体属性”的新专利。该专利描述了一项使用两个神经网络仅依赖图像数据来测量物体距离的发明,可以让车辆通过图像数据和机器学习,检测并解释与周围环境的距离。
特斯拉一直在追求通过纯视觉方案实现智能驾驶,马斯克希望特斯拉将来甚至不再使用雷达传感器。马斯克曾表示,4月将发布的FSD Beta版拥有纯净的视野,甚至不使用雷达,他称“这就是通往真实世界AI的方式。”

据悉,特斯拉的这项专利为特斯拉提供了一种自动标记视觉数据的方法,描述了一种在传感器和摄像机之间具有良好平衡的配置,可以确定车辆周围物体的距离。这一配置将大大改善其完全自动驾驶(FSD)技术,减少对传感器的依赖,并增加从图像中提取的数据量,使得4月即将更新的FSD Beta版有更好的性能。
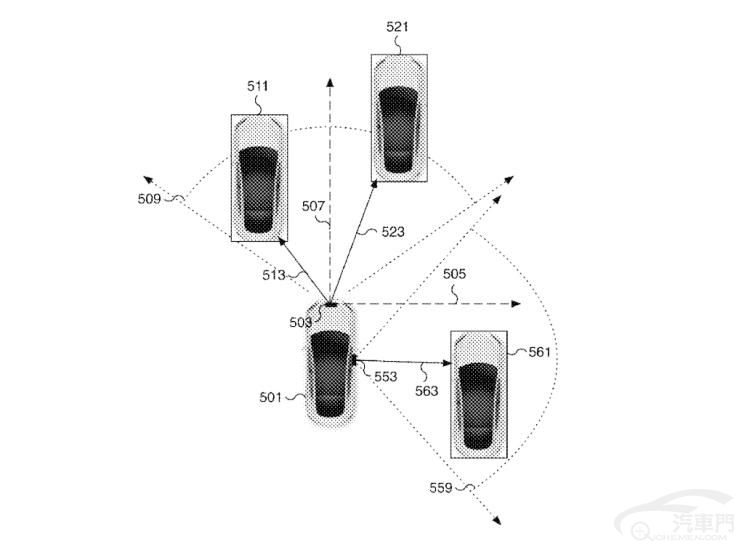 从应用的角度讲,特斯拉的这项专利试图解决自动驾驶汽车的高成本问题,自动驾驶进阶的惯常方案是搭载更多的视觉传感器(如雷达,激光雷达和超声波传感器),势必带来高成本、高带宽要求和高复杂性问题。而特斯拉认为,自动驾驶车辆上的传感器最佳配置是:限制传感器的总数,而不是限制捕获数据的数量和类型,从而达到既能准确描述周围环境并安全地控制车辆的目的,又能降低应用成本,实现高性能与低成本的双赢。
从应用的角度讲,特斯拉的这项专利试图解决自动驾驶汽车的高成本问题,自动驾驶进阶的惯常方案是搭载更多的视觉传感器(如雷达,激光雷达和超声波传感器),势必带来高成本、高带宽要求和高复杂性问题。而特斯拉认为,自动驾驶车辆上的传感器最佳配置是:限制传感器的总数,而不是限制捕获数据的数量和类型,从而达到既能准确描述周围环境并安全地控制车辆的目的,又能降低应用成本,实现高性能与低成本的双赢。
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如作者信息标记有误,请第一时间联系我们修改或删除,多谢。



